
ION GNSS Software Defined Receiver Metadata Standard
MuSNAT Generated Rinex Files
Multi Sensor Navigation Analysis Tool (MuSNAT) is a high-end GNSS software-defined transceiver that has been developed to fulfill modern day requirements of navigation application areas. Along with conventional GNSS receiver functionality (acquisition, tracking, position computation), MuSNAT supports multi-frequency, multi-GNSS and multi-sensor processing which makes it suitable for a wide range of applications areas including GNSS signal quality monitoring/analysis, positioning in RTK or PPP modes as well as integration of GNSS and other navigation technologies such as INS or LiDAR. At backend of MuSNAT’s processing chain is MuSNAT Core that processes the input GNSS and other sensor data and logs all the results into an SQL database. A dedicated graphical user interface then allows the user to visualize the data in a time synchronous way in order to identify relationships between the input signals and receiver performance parameters. For reducing the overall processing time, MuSNAT also supports a parallel execution mode that shifts the processing load of correlation computation from CPU to and Nvidia CUDA compatible GPU.
Further details about MuSNAT can be obtained at: https://www.unibw.de/lrt9/lrt-9.2/software-packages/musnat/view
Sample data sets that are available on this webpage were downloaded and processed using MuSNAT to generate RINEX observation files for forming a basis of GNSS SDR performance comparison.
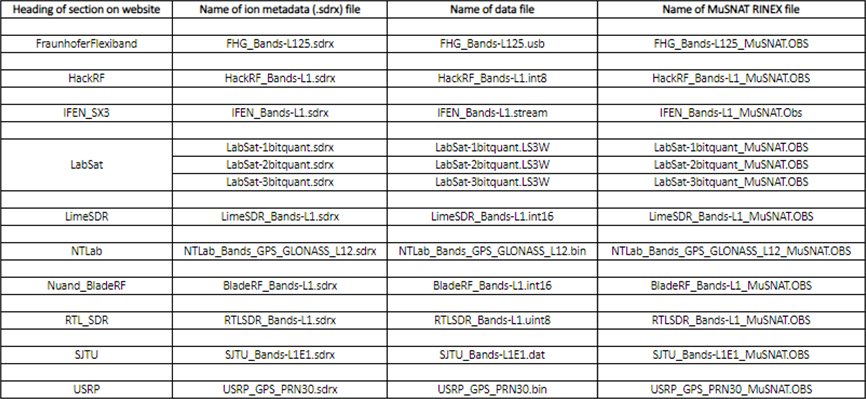
The following table lists the naming details of the processed data and the generated MuSNAT RINEX files:
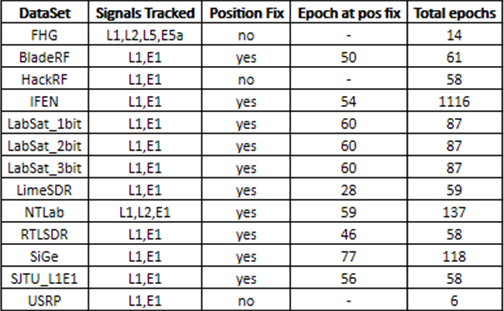
The following table briefly summarizes the results obtained with MuSNAT processing the sample data sets:
RINEX files for all the data sets except OhioTRIGR_GpsGalileo and SJTU_Beidou2-B1 data set were successfully generated and can be downloaded from the links below:
- BladeRF_Bands-L1_MuSNAT.OBS
- FHG_Bands-L125_MuSNAT.OBS
- HackRF_Bands-L1_MuSNAT.OBS
- IFEN_Bands-L1_MuSNAT.OBS
- LabSat-1bitquant_MuSNAT.OBS
- LabSat-2bitquant_MuSNAT.OBS
- LabSat-3bitquant_MuSNAT.OBS
- LimeSDR_Bands-L1_MuSNAT.OBS
- NTLab_Bands_GPS_GLONASS_L12_MuSNAT.OBS
- RTLSDR_Bands-L1_MuSNAT.OBS
- SJTU_Bands-L1E1_MuSNAT.OBS
- USRP_GPS_PRN30_MuSNAT.OBS
The MuSNAT configuration file used for processing all data sets can be downloaded from the link below for reference:
Dedicated to the advancement of the art and science of positioning, navigation and timing (PNT).
© 1995-2017, The Institute of Navigation, Inc. Privacy Policy and Terms of Service